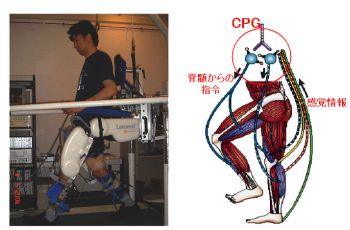
図1 左:歩行訓練用ロボット(Lokomat)を用いた歩行訓練の様子。
右:脊髄内にある歩行パターンを生み出す神経回路(CPG)の概念図
|
脊髄損傷者のための新しい歩行 トレーニング機器開発への取り組み |
| 研究所 運動機能系障害研究部 神経筋機能障害研究室長 中澤 公孝 |
研究所運動機能系障害研究部では脊髄を損傷して立位・
歩行が困難となった人たちに、何らかの形で再び立って歩
いていただこうということを目的として、様々な側面から
の研究を行っています。今回は、これまでに得られた研究
成果を軸に考案した新しいコンセプトの歩行トレーニング
マシーンの考え方と開発状況について紹介します。
歩行トレーニングマシーンの特徴
特徴①:神経系の回復を図る
脊髄の損傷といっても自分の意志の下にわずかでも脚を
動かせる場合(不完全麻痺)と全く動かせない場合(完全
麻痺)があります。現在のところ、脳と脊髄との連絡が10
0%途絶えている完全麻痺では、残念ながら自立歩行の回復
は不可能とされています。しかし、不完全麻痺であれば理
屈上は歩行トレーニングによって再び歩行能力が回復する
可能性がある、と考えられています。不完全麻痺者の立位
歩行を回復させるのに効果的であることが知られている方
法にトレッドミル上で理学療法士やロボットが脊髄損傷者
の左右脚を交互に足踏みさせるトレーニング方法がありま
す(図1)。この方法は、たとえトレーニング開始時に自
分の力で足踏みすることができない脊髄損傷者でも、他動
的に脚を動かしてもらいながらトレーニングすることで、
もともと脊髄内に存在する歩行パターンを生み出す神経の
回路を再び活動させ、さらに脳を含めた脊髄以外の中枢神
経に歩行を再学習させようとするものです。私たちが開発
しているマシーンも基本的にこの考え方を採用しています。
しかし、それに加えてさらに重視している点があります。
それはいかに“やる気”を引き出すかです。“やる気”を
もって動かしづらい脚を積極的に動かそうとすることが極
めて重要と考えているのです。これでは精神論、根性論に
近いと感じられるかもしれませんが、そうではなく、科学
的な論理に則った話です。先に中枢神経に歩行を再学習さ
せる、ということを書きましたが、これを効果的に行うた
めには、単に他動的に脚を動かすのではなく、同時に脳か
らの命令が脊髄に送られることが重要であることが明らか
となってきたのです。脳からの命令が脊髄に送られるとい
うのは、例え脚が十分に動かなくても自分の意志で動かそ
うとするということに外なりませんので、とにかく動かそ
うとするという努力が必要ということです。新しいマシー
ンでは、そのような積極的な努力を引き出すことをねらっ
ています。
特徴②:体力の維持・回復を図る
次のポイントは、このマシーンが単に歩行のリハビリだ
けでなく、使用者の体力を強化し、ひいては健康の維持に
貢献することを目指している点にあります。長期に及ぶ車
椅子生活は必然的に活動性を低下させ、それが引き金とな
る様々な身体上の不具合をもたらします。それらは二次的
な障害と呼ばれるものですが、その予防は生活の質を維持
する上で大変重要です。この点に完全麻痺と不完全麻痺の
違いはありません。私たちはこれまでの研究結果から、立
位での運動が運動量を確保し、体力を維持・増進するため
の運動形態として優れていることを確認してきました。先
に歩行トレーニングは完全麻痺者の歩行能力を回復させな
いと書きましたが、体力・健康維持の面からは完全麻痺者
では、むしろ運動量を確保することの必要性は不完全麻痺
者より高いといえます。完全麻痺では麻痺領域の活動がほ
とんど無いからです。新しいマシーンは残存機能の積極的
な使用を促します。さらに下肢の他動運動を加えることに
よって、心臓循環系など座位での上肢運動では十分刺激す
ることができない身体諸器官への刺激効果をねらっていま
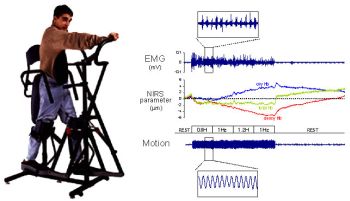
す。例えば両方の脚が麻痺していたとしても、歩行に似た
脚の動きを他動的に行うことで筋の活動を反射性に引き出
すことができます(図2)。この筋活動によって麻痺して
いる筋の血流や代謝活動が促進される可能性があることを
私たちの研究は明らかにしました(Kawashima et al. 2005)
。開発中のマシーンはこのような知見に則り、歩行に似た
脚のステッピング運動を補助することができるようになっ
ているのです。
おわりに
写真は現在までに製作されたマシーンの概観です。これを
たたき台にさらに修正を加え、実用化へと結びつける予定
です。近いうちに完成版をご紹介できることを楽しみにし
ています。
文献
Kawashima K, Nakazawa K, Akai M. Muscle oxygenation of
the paralyzed lower limb in spinal cord injured persons.
Med Sci Sport Exerc 37, 915_921, 2005.


|
|
|