研究所で開発した電動車いすシミュレータをご存じでしょうか。
通称“のぞみちゃん”と呼ばれ、電動車いすの新しい入力系の開発や、
病院のシーティング適合サービスでの電動車いすの適合場面で活躍していました。
この度、この電動車いすシミュレータを大改修しました。
ブラックマスクのかっこいいデザインに大変身です。
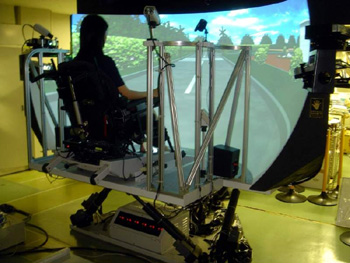
今回、科学技術振興調整費の補助をうけ、世界初の技術を用い、
広い視野で場面を見渡すことができるシステムを構築しました。
このシステムは、球面状の画面を有し、4台のプロジェクターを用いて、
左右120°、上下57°の視野範囲で、立体感のある画像を表示します。
通常球状の画面にプロジェクターの画像を投影すると、ゆがんだ画面になります。
このシステムでは三菱電機アメリカ技術研究所(MEARL)が開発し、
三菱プレシジョンが実用化したプロジェクションクラスター技術を用いて、
そのゆがみやそれぞれのプロジェクター映像の重なり部分を補正し、
臨場感のある映像を提示することに成功しました。場面としては、
国立身体障害者リハビリテーションセンター病院内の映像を用意しました。
忠実に再現したのですが、なんと、病院の改修工事が実施され、微妙に違ってしまいました。
残念。それでも、大画面に表示される映像のおかげで、
あたかも病院にいるような感覚を体験することができます。
病院の廊下では、実際に電動車いすの操作練習を行っています。
実際の電動車いすの操作練習場面を用意することで、
シミュレータでの評価や練習の後、電動車いす実機を用いた走行練習への移行をスムーズに行えるよう配慮しました。
本システムは、今年の3月に設置が完了し、現在、調整と性能評価を実施しています。
今年度の前半で、これらの評価が終了し、実際の運用を開始する予定です。
このシステムの役割は大きく分けて2つあります。
一つは、研究開発への応用です。現在、国立身体障害者リハビリテーションセンター研究所と産業技術総合研究所、
東京大学が共同で、既存の操作入力装置の使用が困難な重度障害者の方を対象とした、
電動車いすの開発を行っています。このプロジェクトでは、音声認識、
ジェスチャー認識、筋電検出、力覚検出といった、最先端の技術を導入して、
電動車いすの操作入力システムを開発しています。このシミュレータは、
それらの新しい入力システムが本当に障害者の方に使えるシステムなのかを評価する、
プラットフォームとして使用されます。もう一つの役割は、臨床場面での使用です。
この電動車いすシミュレータは市販の各種入力装置を接続して、操作することが可能です。
病院で実施しているシーティング適合サービスでは、通常のジョイスティックの操作が難しい方を対象として、
電動車いすの適合サービスを行っています。このシミュレータは、
個々の方に最適な操作入力装置を見つけるために有効なシステムであり、
このような場面での活躍が期待されます。
今回紹介した電動車いすシミュレータは、重度の障害がある方々の隠れた能力を引き出し、
自立移動を実現するための強力なツールになります。自立移動というある意味、当たり前の活動が、
重度の障害のある人では、なぜできないのでしょうか。現代の工学技術を駆使することで、
重度障害者の限られた機能を最大限活かして、最大限の自立を実現することができます。
その架け橋をつくることも、このシミュレータの役割かもしれません。