亙恾侾丂幮夛偺曄妚傪嶻傓RT偲IT偺梈崌偱惉傝棫偮IRT僀僲儀乕僔儑儞亜
| 乲尋媶強忣曬乴 |
|
島墘夛丒堄尒岎姺夛乽彮巕崅楊幮夛偲恖傪巟偊傞俬俼俿婎斦偺憂弌 |
| 尋媶強丂暉巸婡婍奐敪晹丂丂堜忋丂崉怢 |
丂嫀傞7寧23擔乮悈乯丄尋媶強偵偍偄偰乽彮巕崅楊幮夛偲恖傪巟偊傞俬俼俿婎斦偺憂弌乿偲戣偟偰丄島墘夛丒堄尒岎姺夛傪奐嵜偟傑偟偨丅俬俼俿偲偼僀儞僼僅儊乕僔儑儞丒傾儞僪丒儘儃僢僩丒僥僋僲儘僕乕偺棯偱丄忣曬媄弍偲儘儃僢僩媄弍傪梈崌偟偨愭抂媄弍偱偡丅偙偺暘栰偺尋媶傪悇恑偟偰偄傞搶嫗戝妛俬俼俿尋媶婡峔偺壓嶳孧嫵庼偐傜偛島墘傪偄偨偩偔偲偲傕偵丄摉儕僴僙儞僞乕偱攟偭偰偒偨儕僴價儕僥乕僔儑儞暘栰偱偺愱栧惈傪儀乕僗偲偟偰婖溳偺側偄堄尒岎姺傪峴偄傑偟偨丅嶲壛幰偼20柤掱搙偱偟偨偑丄尋媶強偺懠丄娕岇晹偐傜傕偛嶲壛偄偨偩偒丄桳堄媊側媍榑偑揥奐偝傟偨偲巚偄傑偡丅杮峞偱偼丄搶嫗戝妛偺搚旍揙師偝傫偵俬俼俿偺尋媶摦岦偵偮偄偰丄尨峞傪偍傑偲傔偄偨偩偒傑偟偨丅媄弍奐敪傪恀偵栶棫偮曽岦偵桿摫偟偰偄偔偙偲傕丄摉僙儞僞乕偺堦偮偺栶妱偵側傞偺偱偼丄偲巚偭偰偍傝傑偡丅偛堄尒摍偛偞偄傑偟偨傜丄堜忋inoue@rehab.go.jp傑偱偄偨偩偗傟偽偲巚偄傑偡丅
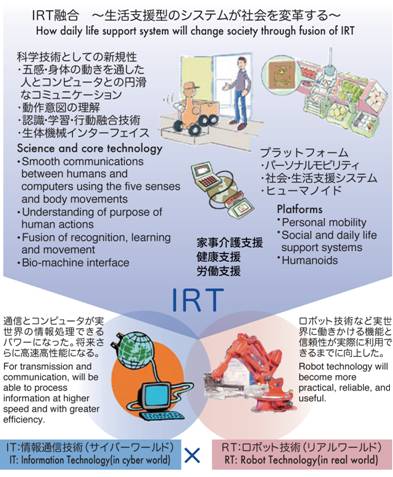
丂搶嫗戝妛IRT尋媶婡峔偼丄壢妛媄弍怳嫽挷惍旓乽愭抂梈崌椞堟僀僲儀乕僔儑儞憂弌嫆揰偺宍惉乿偵丄暯惉18擭搙偐傜10擭娫偺梊掕偱嵦戰偝傟偨乽彮巕崅楊幮夛偲恖傪巟偊傞IRT婎斦偺憂弌乿僾儘僕僃僋僩傪悇恑偡傞尋媶嫆揰偱偡丅IRT偲偼丄揹巕儊乕儖傗Web 側偳偺拪徾揑側忣曬傪埖偆偙偲傪摿挜偲偡傞IT (Information Technology) 偲丄儅僯僺儏儗乕僞偵傛傞憖嶌偺傛偆側暔棟揑側宍傗摦偒偵傛傞婡擻敪尰傪摿挜偲偡傞RT (Robot Technology)偲傪梈崌偟偨愭抂壢妛媄弍梈崌椞堟偺偙偲傪堄枴偟傑偡丅IRT尋媶婡峔偱偼丄IT偲RT偵壛偊丄擼丒擣抦摍偺惗暔妛揑抦尒傗丄幮夛壢妛揑側抦尒傪庢傝擖傟偨怴偟偄愭抂壢妛媄弍梈崌椞堟傪妋棫偟丄擔杮偑悽奅偵懳偟偰桪埵惈傪帩偮暘栰偱偁傞帺摦幵丄壠揹惢昳丄儊僇僩儘僔僗僥儉偵傕IRT媄弍傪揔梡偡傞偙偲偱峀斖側IRT僀僲儀乕僔儑儞傪憂弌偡傞偙偲傪栚巜偟偰偄傑偡丅傑偨丄僀僲儀乕僔儑儞憂弌傪栚巜偟偨尋媶傪悇偟恑傔傞偩偗偱側偔丄嶻妛楢実偺怴偨側儌僨儖偺幚尰丄嵶暘壔偝傟偨愱栧椞堟傪寢傃偮偗丄壽戣夝寛傪幚尰偡傞擻椡傪旛偊偨恖嵽偺堢惉側偳偺僔僗僥儉夵妚偺幚尰傕栚巜偟偰偄傑偡丅
亙恾侾丂幮夛偺曄妚傪嶻傓RT偲IT偺梈崌偱惉傝棫偮IRT僀僲儀乕僔儑儞亜
丂擔杮偑悽奅偺愭恮傪愗偭偰捈柺偡傞彮巕崅楊幮夛偱偼丄擭楊傗恎懱忦審丄壠掚忦審側偳偺懡條側忬嫷偵抲偐傟傞恖丄偡傋偰偺恖乆偑幮夛妶摦偺堦抂傪扴偄丄幙偺崅偄妶摦傪堐帩偡傞偙偲偑丄妶婥偁傞帩懕揑敪揥偺偨傔偵昁梫晄壜寚偩偲峫偊傜傟傑偡丅偦偺偨傔偵偼丄幮夛偺偁傜備傞嬊柺偱丄懡條側忬嫷偵偁傞恖傪丄偒傔嵶偐偔尗偔巟墖偡傞僔僗僥儉偑昁梫偱偡丅IRT尋媶婡峔偱偼丄壠帠夘岇巟墖丄寬峃惗偒偑偄巟墖丄楯摥巟墖側偳偺弌岥偵戝偒側僀儞僷僋僩傪梌偊傞偨傔偺丄僷乕僜僫儖儌價儕僥傿丄僸儏乕儅僲僀僪丄幮夛丒惗妶巟墖僔僗僥儉偺幚尰傪栚昗偲偟偰偄傑偡丅偙傟偵傛傝丄姶妎塣摦婡擻偺曗彆丄恎懱摦嶌夘彆丄帺嵼側儌價儕僥傿丄愭抂媄弍偺梕堈側僀儞僞僼僃乕僗丄側偳傪採嫙偟丄崅擭楊憌摍偺恎懱揑僴儞僨傿僉儍僢僾傪夝徚偟丄崅偄幙偱偺幮夛丒宱嵪妶摦嶲壛傪壜擻偲偟傑偡丅傑偨丄壠掚惗妶偵偍偄偰偼丄壠帠丄堢帣丄夘岇摍傪曗彆偡傞僔僗僥儉傪採嫙偟丄恖乆偺晧扴傪寉尭偟偰惗妶帪娫偺幙傪崅傔丄懡條側楯摥丒幮夛丒宱嵪妶摦傊偺嶲壛斾棪傪崅傔偨偄偲峫偊偰偄傑偡丅
亙恾俀丂IRT尋媶婡峔偑栚巜偡尋媶僥乕儅偺僀儊乕僕亜
丂偙偺傛偆側IRT僀僲儀乕僔儑儞憂弌傪幚尰偡傞偨傔偵丄僩儓僞帺摦幵姅幃夛幮丄僆儕儞僷僗姅幃夛幮丄姅幃夛幮僙僈丄撌斉報嶞姅幃夛幮丄姅幃夛幮晉巑捠尋媶強丄徏壓揹婍嶻嬈姅幃夛幮丄嶰旽廳岺嬈姅幃夛幮偺7幮偺嫤摥婇嬈偲楢実偟丄搶嫗戝妛憤挿捈妽偺慡妛慻怐偲偟偰IRT尋媶婡峔傪愝抲偟傑偟偨丅尋媶崁栚偲偟偰偼丄IRT僨僶僀僗尋媶丄IRT惂屼尋媶丄IRT娐嫬尋媶丄僒僀僶乕僀儞僞乕僼僃乕僗尋媶丄IRT僔僗僥儉尋媶偺丄5杮偺拰傪拞怱偵尋媶傪悇恑偟偰偄傑偡丅IRT僨僶僀僗尋媶偱偼丄怗妎側偳偺屲姶僙儞僒乕偲恖偺庴梕婍偵偼側偄姶妎僙儞僒乕傪MEMS (Micro Electro Mechanical Systems) 媄弍傪梡偄偰挻彫宆壔偟丄儘儃僢僩偵暘晍揑偵攝抲偡傞偙偲偱丄嵶偐側摦嶌傗峴摦傪幚尰偡傞尋媶傪峴偭偰偄傑偡丅IRT惂屼尋媶偱偼丄儘儃僢僩丄儊僇僩儘僔僗僥儉偺婡峔丄塣摦丄抦擻傪丄椡妛丄寁應丄寁嶼偺娤揰偐傜捛媦偟丄恖娫偺擼偺忣曬張棟偺壖愢偵婎偯偔擣抦妉摼丄峴摦敪尰僔僗僥儉偺奐敪傗丄僶僀僆儊僇僩儘僯僋僗丄堛椕儊僇僩儘僯僋僗側偳偺墳梡傪幚尰偡傞尋媶傪峴偭偰偄傑偡丅IRT娐嫬尋媶偱偼丄儘儃僢僩僱僢僩儚乕僋傗幚悽奅僐儞僺儏乕僥傿儞僌偺媄弍傪梡偄偰丄儘儃僢僩偑摦偒傗偡偄娐嫬傗丄儘儃僢僩偑偝傜偵崅婡擻壔偡傞娐嫬傪幚尰偡傞尋媶傪峴偭偰偄傑偡丅僒僀僶乕僀儞僞乕僼僃乕僗尋媶偱偼丄儘儃僢僩傗恖娫偑峴摦偡傞壆撪奜嬻娫傪僔乕儉儗僗偵偮側偖偨傔偺峀堟僙儞僔儞僌媄弍傗丄屲姶忣曬傪巊偭偨怴偨側僸儏乕儅儞僀儞僞乕僼僃乕僗媄弍丄崅搙側僐儞僥儞僣媄弍傪幚尰偡傞尋媶傪峴偭偰偄傑偡丅IRT僔僗僥儉尋媶偱偼丄僴乕僪偵墳偠偨惂屼僾儘僌儔儉偺帺摦惗惉傗丄崅搙側儅儖僠僄乕僕僃儞僩僔僗僥儉傪幚尰偡傞偨傔偺崅婡擻側摑崌僜僼僩僂僃傾婎斦傪奐敪偡傞偲偲傕偵丄娤嶡偲妛廗偵傛偭偰忬嫷傪擣幆偟丄偝傜偵偼恖偺堄恾傕棟夝偱偒傞帺棩儘儃僢僩僔僗僥儉偺尋媶傪峴偭偰偄傑偡丅
丂IRT尋媶婡峔偱偼丄2013擭傪栚搑偵偙傟傜偺庡梫側尋媶崁栚傪梈崌偟丄惗妶傪巟墖偡傞儂乕儉傾僔僗僞儞僗丄屄恖偺堏摦傪巟墖偡傞僷乕僜僫儖儌價儕僥傿偺2偮偺IRT僔僗僥儉偺幮夛幚徹幚尡偵拝庤偡傞梊掕偱偡丅偙傟偼丄崙棫恎懱忈奞幰儕僴價儕僥乕僔儑儞僙儞僞乕偑栚巜偟偰偄傞乽忈奞傪帩偮恖乆偑幮夛傪峔惉偡傞堦堳偲偟偰幮夛丄宱嵪丄暥壔偦偺懠偁傜備傞暘栰偺妶摦傊嶲壛偡傞偙偲乿偵捠偠傞偲峫偊偰偄傑偡丅儕僴價儕僥乕僔儑儞僙儞僞乕偲楢実偟偰IRT尋媶婡峔偺惉壥偑幮夛偱庴偗擖傟傜傟傞偙偲傪栚巜偟偨偄偲峫偊偰偄傑偡丅
 |
 |
 |