義手(ぎしゅ)とは
事故や病気によって手の切断を余儀なくされた場合に、失われた機能を補うために作られ、使われる人工の手です。
義手の分類
プラスチックや金属、皮革などの材料が用いられ、残存肢の長さや全身状態によって製作可能な義手が異なります。そのため義手の名称は、構造や切断部位、使用する目的など、分類する基準によって異なる呼び方があります。
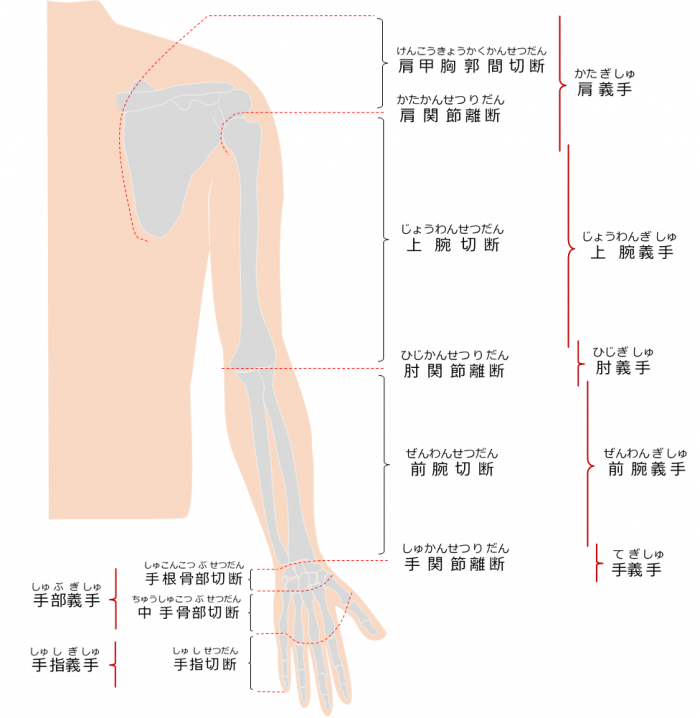
切断部位による分類
構造による分類
義手はその構造の違いによって、殻構造義手(かくこうぞうぎしゅ)と骨格構造義手(こっかくこくぞう)に分けられます。
【殻構造義手】
甲殻類の体の構造と同様に、義手を形成する「殻」の構造が義手に働く力を支え、同時にこの殻の形がそのまま元の手の外観を表す構造の義手です。
【骨格構造義手】
人体の骨格の構造と同様に、関節や骨を継手(つぎて)や「チューブ(パイプ)」などのパーツで構成し、外観はウレタンフォーム材などで造形する構造の義手です。

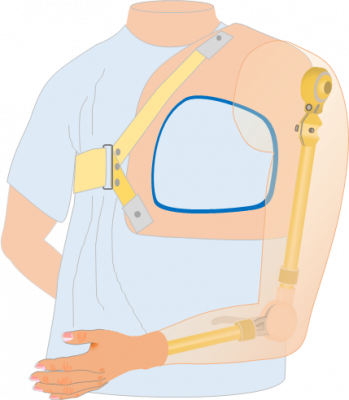
殻構造義手(上腕義手能動式)
骨格構造義手(肩義手その他 <装飾用> )
補装具費支給制度による分類
【能動(のうどう)式】
主として上肢帯(肩甲骨、鎖骨)や上肢及び体幹の運動を、義手の制御のための力源に利用し、ケーブルを介して専用の継手、手先具を操作する構造の義手です。自分の体の残存運動を利用してコントロールケーブルを引っ張り、手先具の開閉や肘継手の固定・遊動のコントロールができます。手先部分が随意に開閉するもので、つまみ動作が可能となります。この義手を有効に使うためにはコントロールケーブルシステムのチェック、装着訓練などが必要です。切断者が職業復帰をするために多く用いられています。
【電動式】
モーターとバッテリーにより手先具や継手を駆動させる義手です。操作にはセンサーやスイッチを使用します。筋電位(きんでんい)センサーを用いた筋電電動義手は、筋肉を収縮する時に発生する筋電位を、電極と呼ばれるセンサーを用いてスイッチとして利用し、電動ハンド(手先具)を開閉することができる義手です。
【その他】
装飾用
外観の復元を第一義的に考えた義手で、各関節に相当する部には他動的に可動する継手が組み入れられています。
作業用
外観は考慮せずに、個々の作業(農耕、山林作業や工業関係の重作業)に適した「手先具(てさきぐ)」(指に相当する機能を持つ先端部分)を選んで取り付けられる構造になっている義手です。丈夫で軽く、取り外しが簡単かつ、取り付けた手先具が任意の角度で確実に連結されることが大切です。
義手を構成する部位
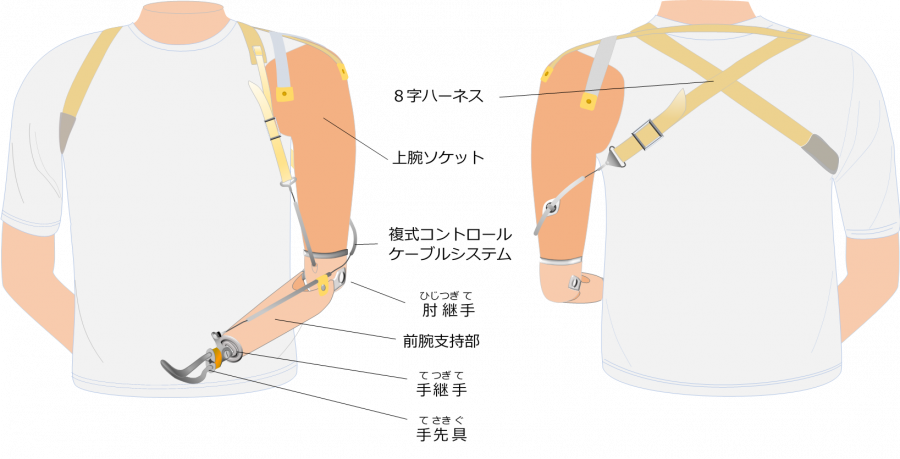
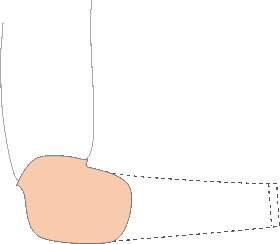
上腕義手(殻構造・能動式)
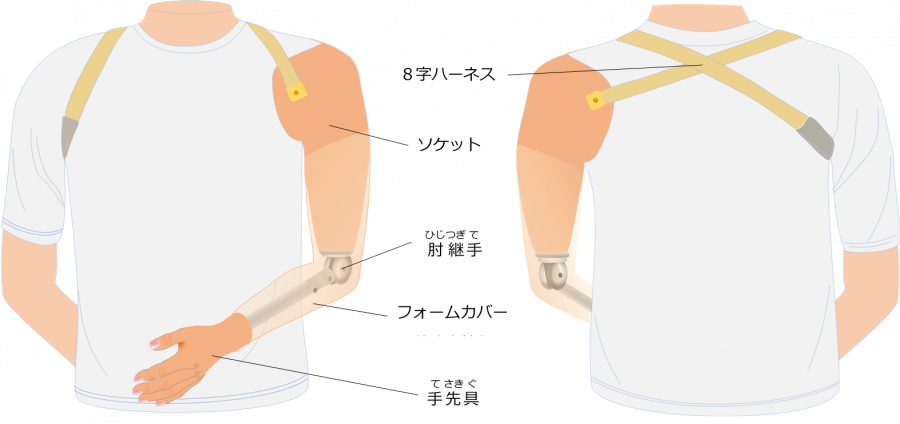
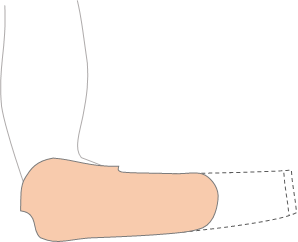
上腕義手(骨格構造・その他<装飾用>)
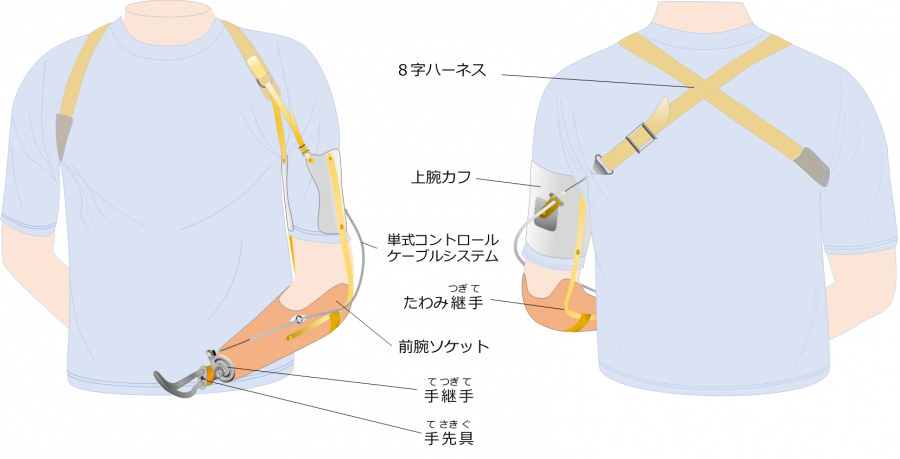
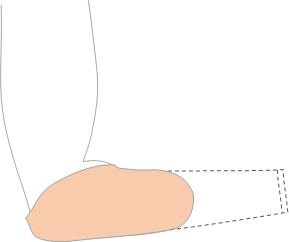
前腕義手(殻構造・能動式)
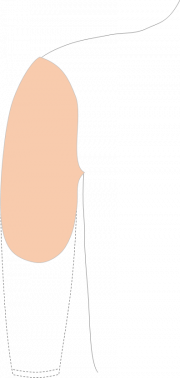
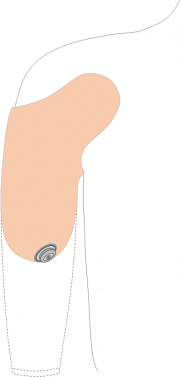
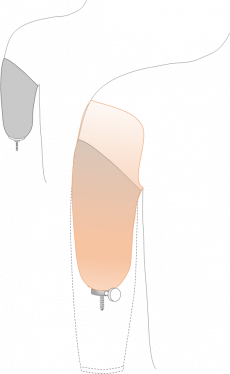
【ソケット】
切断後の残された腕の部分である「断端(だんたん)」を、適切に収めて義手に力を伝えるための重要な部分です。切断部位や断端長、義手の使用目的に合わせてソケットの種類を選択します。
上腕義手差込式ソケット
上腕義手オープンショルダー式ソケット
上腕義手ライナー式ソケット
前腕義手差込式ソケット
前腕義手ミュンスタ―式ソケット
前腕義手ノースウェスタン式ソケット
前腕義手ライナー式ソケット
前腕義手スプリットソケット
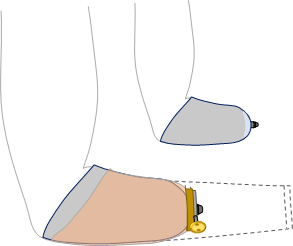
【支持部】
義手のソケットと継手、または継手同士の相互の距離を維持し力を伝達する部分です。
【継手】
身体の肩、肘、手、指関節を代替するもので、切断部位と切断者の残存能力、義手の使用目的に応じて選択します。
-
肩継手
生体の肩関節の動きを代償するための継手部品で、体幹部と上腕部を繋ぎます。肩の屈曲、伸展、外転などの動きを代償する機能を持っています。
-
肘継手
生体の肘関節を代償するための継手部品で、上腕部と前腕部を繋ぐものであり、その動きにより、硬性たわみ式、単軸ヒンジ、多軸ヒンジ、倍動ヒンジ、能動単軸ブロック式、手動単軸ブロック式、作業用幹部式などがあります。
-
手継手
前腕部と手部を繋ぐ部品です。手先具の付け外しや手関節の回内外や掌背屈の動きを再現させるために、面摩擦式、軸摩擦式、迅速交換式、屈曲式、作業用幹部式、手部コネクタなどがあります。
【外装】
義手の外側を包んで美観上の外観を整えるために使用します。
【ハーネス】
義手を懸垂し、上肢帯(肩甲骨、鎖骨)の運動をケーブルの牽引力に変換する目的で肩・胸郭などに装着する装置です。
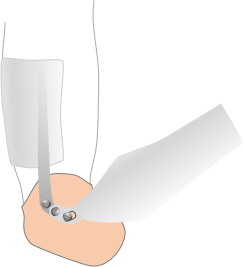
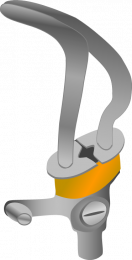
【手先具】
手の外観、把持、引っかけるなど手の持つ機能を再現するために、能動フック、能動ハンド、装飾ハンド、装飾手袋(コスメチックグローブ)、電動ハンド、作業用手先具などがあります。
能動フック

能動ハンド
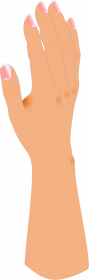
装飾手袋

電動ハンド
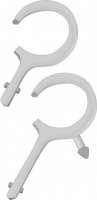
曲鉤(きょくこう)

双嘴鉤(そうしこう)
鍬持ち金具(くわもちかなぐ)

鎌持ち金具(かまもちかなぐ)